Home › Forum › SOFA › Using SOFA › [SOLVED] Kinematic chain creation
- This topic has 3 replies, 2 voices, and was last updated 8 years, 7 months ago by
luibass92.
-
AuthorPosts
-
8 November 2016 at 17:33 #7762
luibass92
BlockedHi everyone!
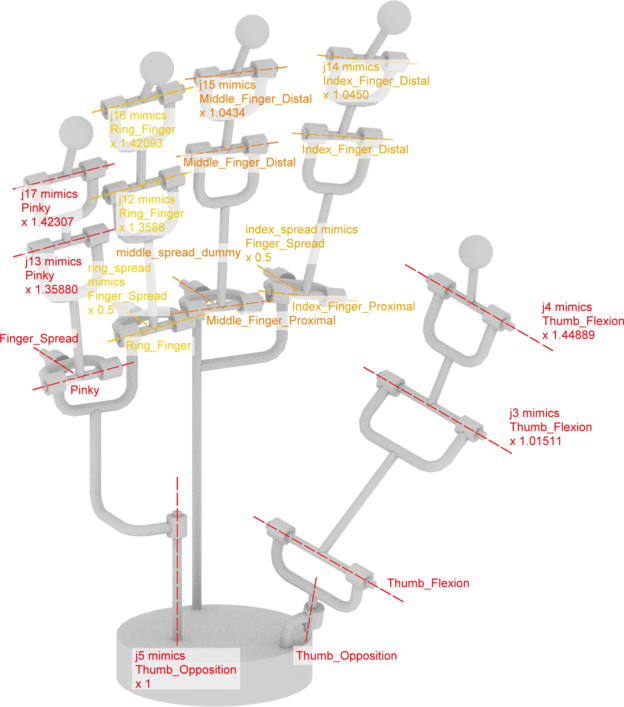
I’m a SOFA new user and I need to create a kinematic chain but I don’t know how to do it. In particular I need to recreate the schunk robotic hand.
Here there is a scheme of the hand:
http://wiki.ros.org/schunk_svh_driver?action=AttachFile&do=get&target=svh_joint_names.pngI don’t care about the visualization/rendering problems, just the kinematic chain is OK for the moment.
I tried to use the Modeler but it doesn’t seem to work properly, I have a lot of errors, so I guess I have to create the scene completely in XML.
The tutorials have visualization errors too and I have a lot of difficulties to use them so I don’t think they can be helpful.Can you please help me in some ways? Do you have some examples that I can take as a starting point?
Thanks and best regards.
9 November 2016 at 09:22 #7763Matthieu Nesme
BlockedHi,
have a look to the Compliant plugin and its python API (StructuralAPI).
The example sofa/applications/plugins/Compliant/examples/bielle_manivelle/structuralAPI.py shows how to build such a system.
— Matthieu
9 November 2016 at 11:16 #7764BlockedHi Matthieu,
first of all thanks for your reply.
I have tried to install the Compliant plugin: I have done the configuration another time checking the right box and I have done the make another time, but I have the following error during the make processIn file included from /home/luigi/sofa/v16.08/src/applications/plugins/Compliant/initCompliant.cpp:26:0: /home/luigi/sofa/v16.08/src/applications/plugins/Compliant/../SofaPython/PythonCommon.h:28:24: fatal error: Python.h: File o directory non esistente # include <Python.h> ^ compilation terminated. make[2]: *** [applications/plugins/Compliant/CMakeFiles/Compliant.dir/initCompliant.cpp.o] Errore 1Do you know how to solve it? It seems that the Python.h file included in the PythonCommon.h is lost.
Maybe it’s useful to know that during the configuration I haven’t installed anything but the default things and the Compliant plugin.EDIT: I have solved the problem installing the PLUGIN_SOFAPYTHON too. Now the compilation works.
9 November 2016 at 11:57 #7765BlockedI’ve just seen the example, it seems useful but really hard to understand for a really new user like me.
I was looking for something easy like two or three links linked by rotational joints or something similar.Thanks, Luigi.
-
AuthorPosts
{kind=link}
- You must be logged in to reply to this topic.